Reklama
Autá na diaľkové ovládanie sú síce zábavné, ale self-jazdy robotické autá sú ešte zábavnejšie. V tomto tutoriále postavíme štvorkolesového robota, ktorý dokáže jazdiť a vyhnúť sa prekážkam. Kúpil som táto kompletná súprava 4WD od AliExpress, väčšinu týchto komponentov však môžete ľahko kúpiť v obchode s elektronikou a dať si ich dokopy sami.
Odporúčame prečítať si všetky pokyny skôr, ako začnete, pretože to objasní niektoré veci, ktoré by mohli byť pri prvom uvedení do omylu mätúce. Môže to tiež vyzerať ako veľmi dlhý, pokročilý projekt kvôli dĺžke pokynov, ale v skutočnosti je to celkom jednoduché. Netreba sa zastrašovať - jedná sa o projekt začiatočníkov, s ktorým môžete dosiahnuť uspokojivé výsledky, a potom sa môžete dozvedieť viac. Nepáči sa vám tento štýl robota? Tu je niekoľko ďalších Arduino roboty 8 robotov Arduino, ktoré môžete zostaviť za menej ako 125 dolárovArduino dokáže veľa, ale vedeli ste, že dokáže vytvoriť plnohodnotných robotov? Za dosť lacné! Čítaj viac namiesto toho by ste mohli ľahko stavať.
Po vybratí všetkého z obalu máme toto:

Na začiatok pripojíme motory a mostík H (karta, ktorá dodáva motorom energiu) k spodnej časti podvozku. Najskôr pripevnite štyri kovové konzoly (sú to obdĺžnikové, vŕtané kovové bloky) ku každému motoru pomocou dvoch dlhých skrutiek a dvoch matíc.

Musíte sa uistiť, že sú správne pripevnené. Preto si pozrite obrázok nižšie a uistite sa, že strana bloku s dvoma vyvŕtanými otvormi bude smerovať nadol. Vodiče na každom motore smerujú do stredu podvozku.

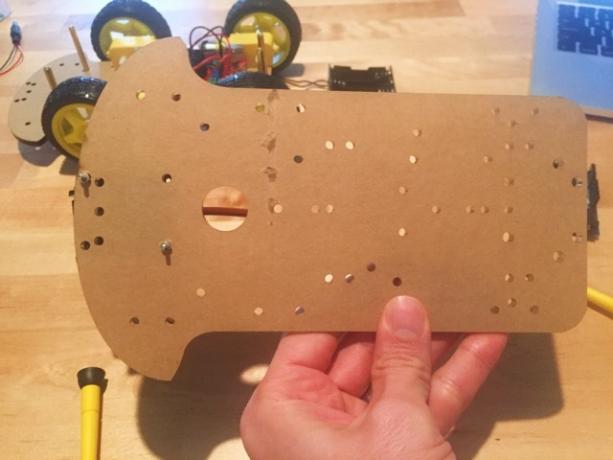
Teraz môže byť každý motor pripevnený k podvozku pomocou dvoch krátkych skrutiek v spodnej časti každej kovovej konzoly. Tu je pohľad na spodnú časť podvozku, aby ste videli, kde musia byť skrutky:

Ďalším krokom je pripevnenie mostíka H (v mojej súprave červenej tabule) k podvozku. Predtým, ako to urobíte, možno budete chcieť počkať, kým nebudú všetky káble pripojené k mostíku H. Je to však na vás (zistil som, že je to jednoduchšie). Rýchla poznámka: v mojej súprave chýbalo niekoľko spojovacích prvkov, a tak som na zaistenie mosta použil elektrickú pásku. Tu však môžete vidieť, kam by sa skrutky a matice dostali:

Po pripojení mostíka H môžete začať zapojovať napájanie. Pretože držiak batérií typu šesť AA je dodávaný s adaptérom na jednosmerný prúd, budete musieť buď orezať koniec (čo som urobil), alebo spustiť prepojovacie vodiče k samotným batériám.

Bez ohľadu na to, ako sa to rozhodnete, spustíte kladný vodič do portu označeného „VMS“ a záporný vodič do portu označeného „GND“ na moste. Zaskrutkujte upevňovacie prvky a uistite sa, že sú bezpečné. Potom pripojíte vodiče motora. Na oboch stranách je sada dvoch portov; jeden je označený ako „MOTORA“ a druhý „MOTORB.“ oba červené vodiče na každej strane pôjdu do najvzdialenejšieho zeleného prístavu a oba čierne vodiče pôjdu do vonkajšej strany. Tento obrázok by mal objasniť:

Zistil som, že musím odtrhnúť časť krytu z motorových vodičov, aby to fungovalo. Teraz, keď máte všetky motory a napájací zdroj všetky zapojené, nasaďte kolesá na hriadele hnacieho hriadeľa motora a pripevnite štyri medené hriadele v miestach zobrazených na obrázku nižšie (každý medený hriadeľ potrebuje jednu malú skrutku). Tento robot sa začína formovať!

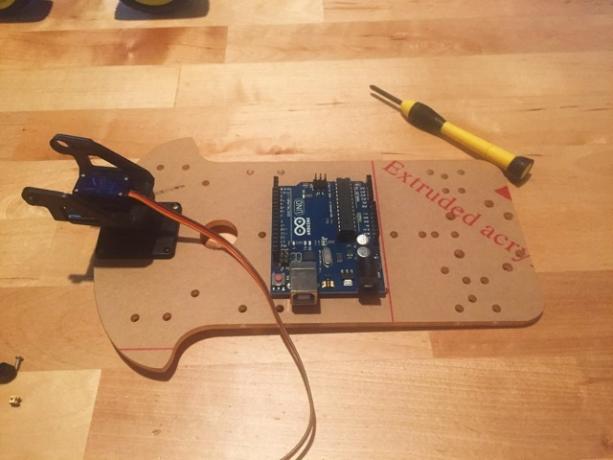
Teraz odložte tú časť podvozku a uchopte tú druhú, ktorá bude sedieť na vrchu. Ďalším krokom je pripevnenie Arduina - opäť som musel použiť elektrickú pásku, ale mali by ste byť schopní lepšie zaistiť svoje pomocou skrutiek a matíc.

Ďalší krok si vyžaduje mikro servo, čierny priečnik, držiak serva (ktorý sa skladá z troch čiernych plastových kusov) a niekoľko malých skrutiek. Na pripevnenie čierneho kríža k mikros servo použite jednu z väčších ostrých skrutiek v súprave:

Potom vytočte servo hore nohami do čierneho plastového krúžku držiaka. Uistite sa, že káble vychádzajúce zo serva sú otočené v rovnakom smere ako dlhšia časť držiaka (opäť pozri obrázok nižšie) a pomocou štyroch malých skrutiek zaistite priečku (v držiaku sú štyri otvory, ktoré sú zarovnané s otvormi na priečka).

Ako vyzerá po pripojení:

Nakoniec zoberte ďalšie dva kusy držiaka serva a zacvaknite ich na servo (v bočných dieloch sú drážky, ktoré sa zhodujú s plastovým pútkom na serve).

Keď je držiak serva kompletný, je možné ho namontovať na podvozok.
Tu sú skrutky:
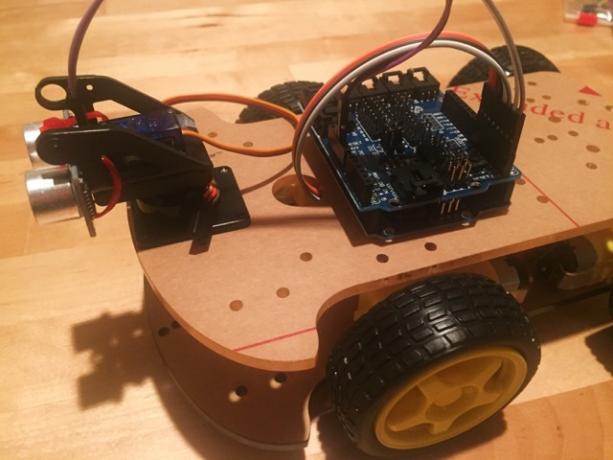
Je čas dať nášmu robotovi nejaké oči. Pripojte ultrazvukový senzor k držiaku serva pomocou dvoch sťahovacích pások.

Ak pracujete z rovnakej súpravy ako ja, dostanete štít snímača Arduino. V tejto zostave ju nebudeme používať, ale teraz ju môžete umiestniť na vrchol UNO, ak chcete (ako to vidím na obrázku nižšie). Zarovnajte kolíky na spodnej časti štítu s vstupno-výstupnými portami na Arduino a stlačením ich nadol pripojte. Momentálne to nepotrebujete, ale štíty sa môžu hodiť Špičkové 4 štíty Arduino na supervelmoc vašich projektovKúpili ste si štartovaciu súpravu Arduino, dodržiavali ste všetky základné pokyny, ale teraz ste narazili na kameň úrazu - na splnenie svojho sna o elektroniku potrebujete viac bitov a bobov. Našťastie, ak máte ... Čítaj viac .

Či už pripojíte štít senzora alebo nie, na pripojenie ultrazvukového senzora k Arduino budete potrebovať štyri káble. Na senzore sú štyri kolíky, VCC, GND, TRIG a ECHO. Pripojte VCC na 5V pin na Arduino, GND na GND a TRIG a ECHO na I / O kolíky 12 a 13.
Teraz uchopte spodnú časť podvozku a pripojte šesť prepojovacích káblov k vstupno-výstupným kolíkom mostíka H (sú označené ako ENA, IN1, IN2, IN3, IN4 a ENB). Poznamenajte si, ktoré farebné káble sú pripojené ku ktorým portom, ako budete vedieť neskôr.

Teraz je čas začať túto vec spájať. Uchopte hornú časť podvozku a postavte ho na vrch medených hriadeľov pripojených k spodnej časti a vodiče pripevnené k mostíku H vytiahnite otvorom v strede podvozku. Šesť vodičov pripojte k I / O portom nasledovne:
- ENA na vstupno / výstupný port 11
- ENB na I / O port 10
- A1 na I / O port 5
- Port A2 na vstup / výstup 6
- Port B1 až I / O 4
- Port B2 na vstup / výstup 3
Teraz pomocou štyroch krátkych skrutiek pripevnite hornú časť podvozku k medeným hriadeľom. Umiestnite držiak batérie na šesť AA na vrchnú časť šasi (ak je to možné, zaskrutkujte ho), pripevnite držiak 9V bunky k Arduino a tento robot je pripravený na rock!
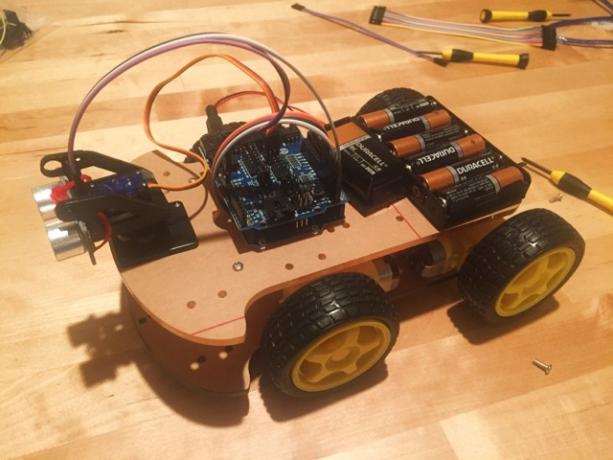
Takmer pripravený na rock. Zatiaľ nemá dosť osobnosti.

Tam ideme. Teraz mu dajte mozog. Urobme nejaké programovanie.
Prvá vec, ktorú urobíme, je test, aby sme sa uistili, že most a motory sú správne pripojené. Tu je rýchly náčrt to povie robotovi, aby šiel o pol sekundy vpred, o pol sekundy vpred, potom odbočil doľava a doprava:
Je to veľa kódu na jednoduchý test, ale definovanie všetkých týchto funkcií uľahčí neskoršie vylepšenie. (Veľká vďaka patrí Billwaa za jeho blogový príspevok o použití mostíka H. pre definovanie týchto funkcií.) Ak sa niečo pokazilo, skontrolujte všetky svoje pripojenia a či sú káble pripojené k správnym kolíkom. Ak všetko fungovalo, je čas prejsť na test senzora. Ak chcete použiť ultrazvukový senzor, budete chcieť stiahnite si knižnicu NewPinga potom použite Skica> Zahrnúť knižnicu> Pridať .ZIP knižnicu ... načítať knižnicu.

Uistite sa, že vyhlásenie o zahrnutí sa nachádza v hornej časti náčrtu; ak tak neurobíš, zasiahneš Skica> Zahrnúť knižnicu> NewPing. Po dokončení načítajte nasledujúcu skicu:
Nahrajte náčrt a otvorte sériový monitor pomocou Nástroje> Sériový monitor. Mali by ste vidieť rýchlo sa aktualizujúcu postupnosť čísel. Držte ruku pred senzorom a zistite, či sa toto číslo zmení. Pohybujte rukou dovnútra a von a mali by ste odmerať, ako ďaleko je vaša ruka od senzora.

Ak všetko fungovalo správne, je čas dať všetko dohromady a nechať túto vec bežať! Tu je kód pre robota Teraz. Ako pravdepodobne viete povedať, v podstate ide o dva testovacie náčrtky spolu s pridaným príkazom if, ktorý riadi správanie robota. Poskytli sme mu veľmi jednoduché vyhýbanie sa prekážkam: ak zistí niečo vzdialené menej ako štyri palce, zálohuje sa, odbočí vľavo a začne sa znova pohybovať. Toto je video robota v akcii.
Dajte svojmu robotovi trochu života
Po správnom fungovaní tohto správania môžete pridať komplexnejšie správanie; urobte robota striedaním medzi otáčaním doľava a doprava alebo náhodným výberom; zaznie bzučiak, ak sa k niečomu priblíži; stačí sa otočiť, namiesto zálohovania; ste naozaj obmedzení iba svojou fantáziou. Môžete použiť takmer čokoľvek vo svojom Štartovacia súprava Arduino Čo je vo vašej štartovacej súprave Arduino? [Arduino začiatočníci]Tvárou v tvár krabici s elektronickými komponentmi sa dá ľahko zahltiť. Tu je sprievodca presne tým, čo nájdete v súprave. Čítaj viac pridať ďalšie funkcie. Všimnite si tiež, že zatiaľ sme pre servo nič nekódovali: môžete skutočne urobiť „oči“ robota tak, aby sa pohybovali tam a späť. možno ich použiť na nájdenie cesty namiesto toho, aby ste ju iba zálohovali, kedykoľvek nájde prekážku priamo pred ňou.
Dajte nám vedieť, ak sa rozhodnete postaviť tohto alebo iného robota a povedzte nám, ako sa rozhodnete prispôsobiť svoje správanie alebo vzhľad. Ak máte nejaké otázky týkajúce sa tohto robota, uverejnite ich v komentároch nižšie a uvidíme, či vám môžem pomôcť!
Dann je konzultant pre obsahovú stratégiu a marketing, ktorý pomáha spoločnostiam vytvárať dopyt a vedie. Blogy venoval aj stratégii a marketingu obsahu na stránke dannalbright.com.